Textbook Notes
MATH 126
Table of contents
Chapter 10: Parametric Equations and Polar Coordinates
10.3: Polar Coordinates
- Polar coordinate system: a point in the plane is the pole. The polar axis is a ray starting from \(0\).
- Polar coordinates - \((r, \theta)\).
- In the polar coordinate system, each point has many representations.
Polar Curves
- Graph of a polar equation - \(r = f(\theta)\), or \(F(r, \theta) = 0\).
- ALl points \(P\) with at least one polar representation \((r, 0)\) whose coordinates satisfy the equation.
- Symmetry rules
- If a polar equation is unchanged when \(\theta\) is negated, the curve is symmetric about the polar axis.
- If the equation is unchanged when \(r\) is negated or \(\theta\) replaced with \(\theta + \pi\), the curve is symmetric about the pole.
- If the equation is unchanged when \(\theta\) is replaced with \(\pi - \theta\), the curve is symmetric about the vertical line at \(\theta = \frac{\pi}{2}\).
Tangents to Polar CUrves
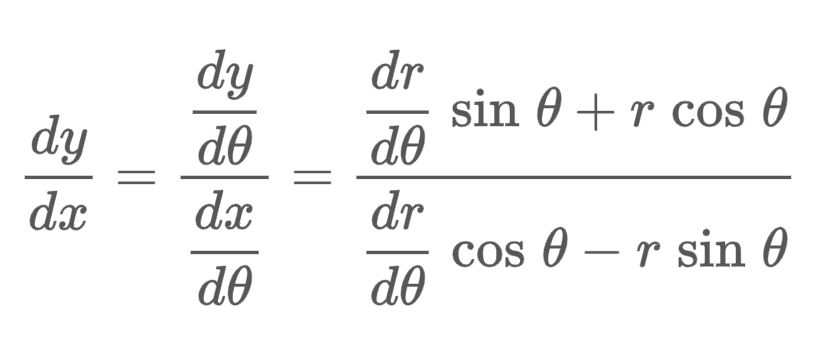
- To find the tangent to \(r = f(\theta)\), use the following parametric equations:
- \(x = f(\theta) \cos \theta, y = f(\theta) \sin theta\).
Chapter 12: Vectors and the Geometry of Space
12.1: Three-Dimensional Coordinate Systems
- Three axes form a three-dimensional space.
- The three-dimensional space is divided into octants.
- If we drop from \(P\) to some plane, it is the projection of \(P\) onto the \(xy\)-plane.
- The Cartesian product \(\mathbb{R} \times \mathbb{R} \times \mathbb{R} = {(x, y, z) \| x, y, z \in \mathbb{R}}\) is the set of all ordered triples of real numbers; denoted \(\mathbb{R}^3\).
Surfaces
- If \(k\) is constant, then:
- \(x = k\) represents a plane parallel to the \(yz\)-plane
- \(y = k\) represents a plane parallel to the \(xz\)-plane
- \(z = k\) represents a plane parallel to the \(xy\)-plane
- Circles and cylinders, free restirction over axes
Distance and Spheres
The distance formula \(\|P_1P_2\|\) between two points \(P_1 (x_1, y_1, z_1)\) and \(P_2 (x_2, y_2, z_2)\) is
\[\|P_1P_2\| = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2 + (z_2 - z_1)^2}\]- This formula is a natural extension of the Pythagorean theorem in two dimensions.
- The equation of a sphere with center \(C$ (h, k, l)\) and radius \(r\) is
12.2: Vectors
- Vector: used to indicate a quantity that has both magnitude and direction. Often represented by an arrow or directed line segment. Vectors are denoted as \(\vec{v}\).
- A displacement vector \(v\) has initial point \(A\) and terminal point \(B\), which can be notated as \(\mathbf{v} = \vec{AB}\).
- To combine vectors, simply add the changes.
- You can multiply a vector by a scalar \(c\).
Components
- If we place the initial point of a vector \(a\) at the origin of a rectangular coordinate system, the terminal point of \(a\) has a coordinate of the form \((a_1, a_2)\) or \((a_1, a_2, a_3)\).
- Coordinates are the components of \(\mathbf{a}\). We can write these as
- This represents a vector rather than a point.
- Different representations of a vector have the same direction and magnitude but may be in different positions. The position with the beginning point at the origin is the posiiton vector of a point.
- The magnitude or length of a vector is the length of any of its representations, and is denoted as \(\| \vec{v} \|\).
- An \(n\) dimensional vector is an ordered \(n\)-tuple.
- Basis vectors:
- \[\vec{i} = \langle 1, 0, 0, \rangle\]
- \[\vec{i} = \langle 0, 1, 0, \rangle\]
- \[\vec{i} = \langle 0, 0, 1, \rangle\]
- Any vector can be expressed as a linear sum of basis vectors.
- Unit vector: a vector whose length is 1. In general if \(\vec{a} \neq 0\), then the unit vector that has the same direction as \(\vec{a}\) is \(\vec{u} = \frac{\vec{a}}{\|\vec{a}\|}\).
Applications
- Vectors are useful in many aspects of physics and engineering.
- Force is represented by vector because it obht has magnitude and direction.
12.3: The Dot Product
- Can we multiply two vectors such that the product is a useful quantity?
\[\vec{a} \cdot \vec{b} = a_1 b_1 + a_2 b_2 + a_3 b_3\]If \(\vec{a} = \langle a_1, a_2, a_3 \rangle\) and \(\vec{b} = \langle b_1, b_2, b_3 \rangle\), then the dot product \(\vec{a} \cdot \vec{b}\) is
The result of a dot product is not a vector, but a scalar. The dot produce is sometimes called the scalar product or inner product.
- Properties of the dot product:
- $$\vec{a} \cdot \vec{a} = |\vec{a}|^2
- \[\vec{a} \cdot \vec{b} = \vec{b} \cdot \vec{a}\]
- \[0 \cdot \vec{a} = 0\]
- \[\vec{a} \cdot (\vec{b} + \vec{c}) = \vec{a} \cdot \vec{b} + \vec{a} \cdot \vec{c}\]
- \[(c\vec{a}) \cdot \vec{b} = c(\vec{a} \cdot \vec{b}) = \vec{a} \cdot (c\vec{b})\]
- The dot product can be interpreted in terms of the angle between \(\vec{a}\) and \(\vec{b}\):
\[\vec{a} \cdot \vec{b} = \|\vec{a} \| \| \vec{b} \| \cos \theta\]If \(\theta\) is the angle between the vectors \(\vec{a}\) and \(\vec{b}\), then
\[\cos \theta = \frac{\vec{a} \cdot \vec{b}}{\| \vec{a} \| \| \vec{b} \|}\]If \(\theta\) is the angle between the nonzero vectors \(\vec{a}\) and \(\vec{b}\), then
- Two nonzero vectors are perpendicular/orthogonal if the angle between them is \(\theta = \frac{\pi}{2}\). Two nonzero vectors ar eorthogonal if and only if their dot product is 0.
Direction Angles and Direction Cosines
- Direction angles of a nonzero vector are the angles \(\alpha, \beta, \gamma\) that a vector makes with the positive axes.
- The cosines of the direction angles are the direction cosines.
- We can square expressions and see the following:
- We can also write the following:
- Dividing both sides by \(\| \vec{a} \|\), we see that the direction cosines of \(\alpha\) are the components of the unit vector in the direction of \(\vec{a}\).
Projections
- Consider \(\vec{PQ}\) \(\mathbf{a}\) and \(\vec{PR}\) \(\mathbf{b}\) with the same initial point \(\vec{P}\). If \(S\) is the foot of the perpendicular from \(R\) to the line containing \(\vec{PQ}\), then the vector with representation \(\vec{PS}\) is the vector projection of \(\mathbf{b}\) onto \(\mathbf{a}\), denoted by \(\text{proj}_a \mathbf{b}\).
- Think of this as the shadow of \(\mathbf{b}\).
- Scalar projbection of \(\mathbf{b}\) onto \(\mathbf{a}\) (the component of \(\mathbf{b}\) along \(\mathbf{a}\)) is the signed magnitude of the vector projection, which is \(\| \mathbf{b} \| \cos \theta\), where \(\theta\) is the angle between \(\mathbf{a}\) and \(\mathbf{b}\). This is denoted as \(\text{comp}_a \mathbf{b}\); this is negative if \(\frac{\pi}{2} < \theta \le \pi\).
- The dot product of two vectors can be interpreted as the length of one multiplied by the scalar projection of the other vector upon the first vector.
Calculating work
- The work done by a constant force \(\vec{F}\) is \(\vec{F} \cdot \vec{D}\), where \(\vec{D}\) is the displacement vector.
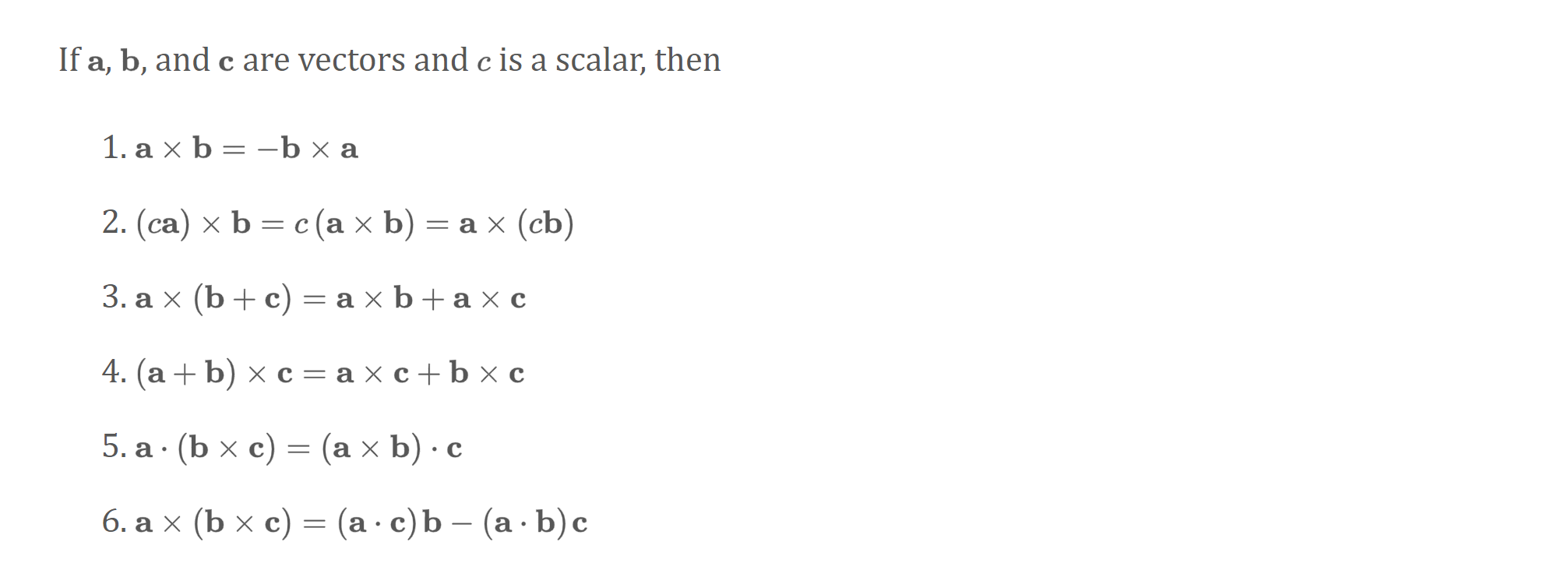
12.4: The Cross Product
- Given two nonzero vectors, it is very useful to find a nonzero vector that is perpendicular to both vectors.
- The cross product of \(\vec{a} = \langle a_1, a_2, a_3 \rangle\) and \(\vec{b} = \langle b_1, b_2, b_3 \rangle\) is
- The cross product/vector product is only defined when \(\vec{a}\) and \(\vec{b}\) are three-dimensional.
- Determinant interpretation of the cross-product.
- The vector \(\vec{a} \times \vec{b}\) is orthogonal to both \(\vec{a}\) and \(\vec{b}\).
- The right-hand rule gives the direction of \(\vec{a} \times \vec{b}\).
- If \(\theta\) is the angle between \(\vec{a}\) and \(\vec{b}\), then \(\| \vec{a} \times \vec{b} \| = \| \vec{a} \| \| \vec{b} \| \sin \theta\).
- Geometric characterization: \(\vec{a} \times \vec{b}\): a vector perpendicular both to \(\vec{a}\) and \(\vec{b}\).
- Two nonzero vectors \(\vec{a}\) and \(\vec{b}\) are parallel if and onlny if \(\vec{a} \times \vec{b} = 0\).
- The length of the crossproduct \(\vec{a} \times \vec{b}\) is equal to the area of the parallelogram formed by \(\vec{a}\) and \(\vec{b}\).
- The cross-product is not commutative. \(\vec{i} \times \vec{j} \neq \vec{j} \times \vec{i}\). The associative law does not hold either.
Triple Products
- The product \(\vec{a} \cdot (\vec{b} \times \vec{c})\) - scalar triple product of the vectors \(\vec{a}\), \(\vec{b}\), and \(\vec{c}\).
- Parallelepiped volume \(V\) is the magnitude of the scalar triple:
- If the scalar product is 0, the vectors lie on the same plane and are coplanar.
12.5: Equations of Lines and Planes
Let \(P(x, y, z)\) be an arbitrary point on a line \(L\). Let \(\vec{r}_0\) and \(\vec{r}\) be the position vectors of \(P_0\) and \(P\). The following is true for some vector \(\vec{a} = \vec{P_0 P}\) and some scalar \(t\).
\[\vec{r} = \vec{r}_0 + t \vec{v}\]This is the vector equation of the line.
We can expand the vector equation of a line, and we obtain the parameteric equations derived from identifying the components of the result of the vector equation.
\[x = x_0 = at\] \[y = y_0 + bt\] \[z = z_0 + ct\]The vector equation and parameteric equations of a line are not unique; we can change the point, parameter, or choose a different parallel vector. This will change the line.
- Symmetric equations: derived from solving each of the parameter equations for \(t\), then setting the expressions all equal to each other.
- You can set a limitation on \(t\) to express only a certain line segment.
- The line segment from \(\vec{r}_0\) to \(\vec{r}_1\) is given by the vector equation
A plane in space is more difficult to describe. A plane in space is determined by a point \(P_0\), a vector \(\vec{n}\) orthogonal to the plane. Let \(\vec{r}_0\) and \(\vec{r}\) be the position vectors of \(P_0\) and \(P\). \(\vec{r} - \vec{r}_0\) is orthogonal to \(\vec{n}\).
\[\vec{n} \cdot (\vec{r} - \vec{r}_0) = 0 \implies \vec{n} \cdot \vec{r} = \vec{n} \cdot \vec{r}_0\]Scalar equation for the plane: write
\[\vec{n} = \langle a, b, c \rangle\] \[\vec{r} = \langle x, y, z \rangle\] \[\vec{r}_0 = \langle x_0, y_0, z_0 \rangle\]This simplifies into
\[a (x - x_0) + b(y - y_0) + c(z - z_0) = 0\]We can rewrite the equation as such:
\[ax + by + cz + d = 0\]Here, \(d = -(ax_0 + by_0 + cz_0)\). This is the linear equation in \(\mathbb{R}^3\).
12.6: Surfaces
- Cylinders and quadric surfaces.
- Traces/cross-sections - curves of intersection on the surface with planes paralle to the coordinate planes.
Cylinders
- Consists of all lines that are parallel to a given line and pass through a given plane curve.
- Parabolic cylinder - made up of infinitely many shifted copies of the same parabola.
Quadric Surfaces
- A quadric surface is the graph of a second degree equation in three variables.
- To sketch an image, find how traces scale in each dimension.
Chapter 13: Vector Functions
13.1: Vector Functions and Space Curves
- Vector-valued function/vector function: a function whose domain is a set of real numbers and whose range is a set of vectors.
- Each number \(t\) in the domain of \(\mathbf{r}\) has a unique vector in \(\mathbf{V}_3\).
- If \(\{f(t), g(t), h(t)}\) are components of the vector $$\mathbf{r}44, we have:
Limits and Continuity.
- The limit of a vector function is defined by taking the limits of the component functions.
- Taking the limit can be interpreted as saying that the length and direction of the vector \(\mathbf{r}\) approach the length and direction of the vector \(\vec{L}\) (where \(\vec{L}\) is the result of the limit.
- A vector function is continuous at \(a\) if $$\lim_{t\to a} \mathbf{r}(t) = \mathbf{r}(a)44.
- The component functions of a vector function must all be continuous at \(a\) for the vector function itself to be considered continuous at \(\vec{a}\).
Space curves.
- Set \(C\) of all points \((x, y, z)\) with \(x = f(t), y=g(t), z = h(t)\), the space curve is derived by tracing \(t\) through an interval \(I\).
- The equations are the parametric equations of \(C\); \(t\) is the parameter.
- Any continuous vector defines space curve \(C\) traced out by moving the tip of the moving vector \(\mathbf{r}(t)\).
- Plane curves can be represented in vector notation. The curve given by the parametric equations \(x = t^2 - 2t\) and \(y = t + 1\) can be described via
- Helix: given by \(x = \cos t, y = \sin t, z = t\)
13.2: Derivatives and Integrals of Vector Functions
Derivatives.
- The derivative of a vector function \(\mathbf{r}\) is dfined similarly for real-valued functions. Take the derivative of the element-wise component functions.
- The second derivaitv eof avector function is the derivative of \(\mathbf{r}\).
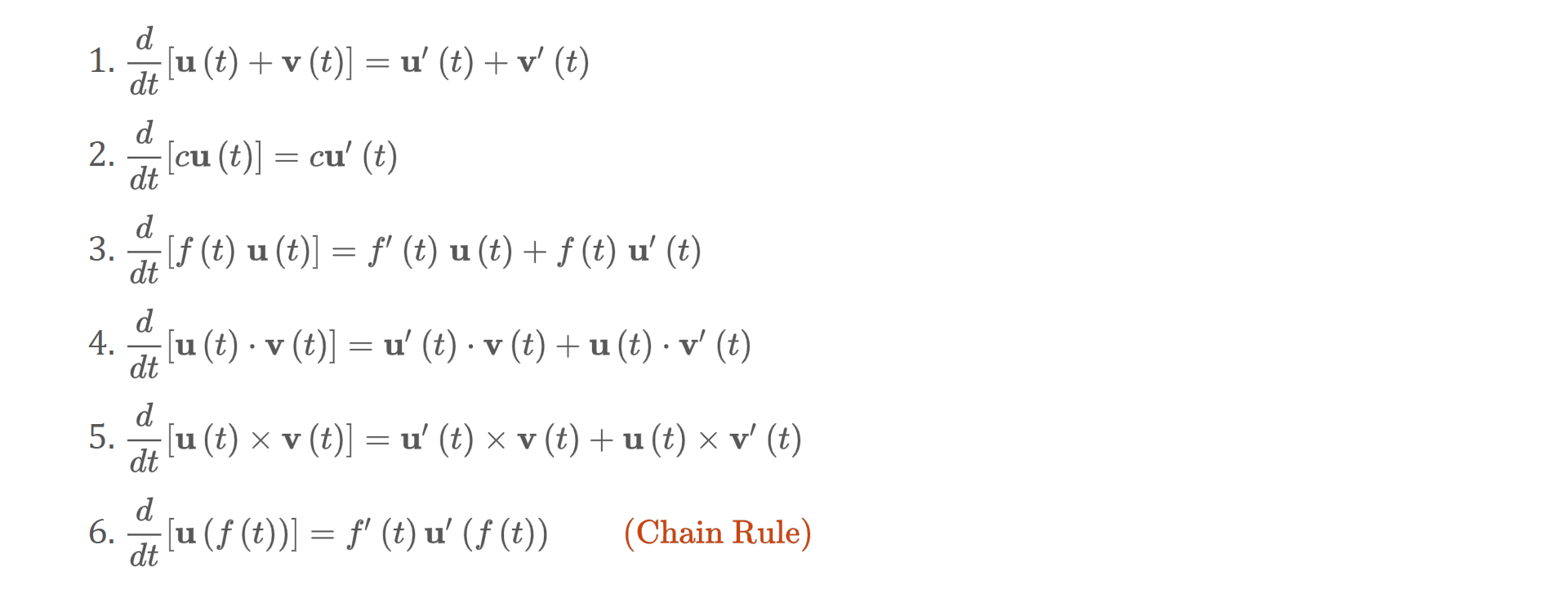
Differentiation Rules
- Differentiation formulas for real-valued functions have counterparts for vector-valued functions.
Integrals.
- You can integrate component-wise, like normal.
13.3: Arc Length and Curvatutre
\[L = \int_a^b \int{f'(t)^2 + g'(t)^2 + g'(t)^2}\] \[L = \int_a^b \| r'(t) \| dt\]- \(r(t)\) is the position vector, \(r'(t)\) is the velocity vector, \(\| r'(t) \|\) is the speed. To compute distance traveled, integrate speed.
The Arc Length Function
- Arc length function \(s\): defined as follows for some \(a\):
- We see that \(\frac{ds}{dt} = \| \vec{r} '(t) \|\)
- It is useful to parametrize a curve w.r.t. arc length - arc length arises naturally from the curve shape and is not coordinate-dependent.
- Solve for \(t\) as a function of \(s\), then reparametrize in terms of \(s\).
Curvature
- A parametrization is smooth on an interval if the derivative is continuous and \(\vec{r}'(t) \neq 0\). A curve is smooth if it has a smooth parametrization. Smooth curves have no sharp corners; the tangent vector turns continuously.
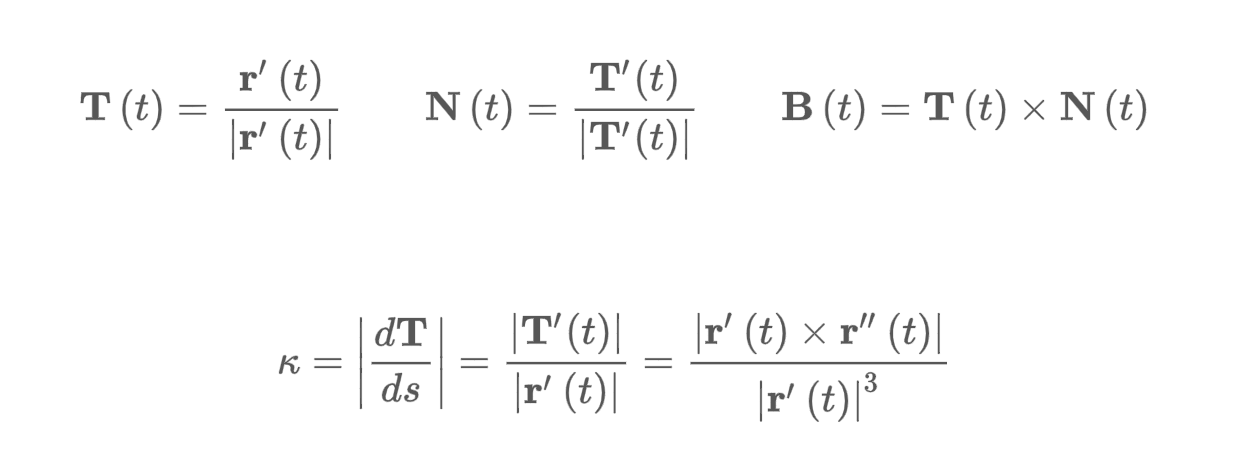
- Curvature - measure of how quickly the curve changes direction.
- The curvature of a curve is \(\| \frac{d\vec{T}}{ds} \| = \| \frac{\vec{T}'(t)}{\vec{r}'(t)} \|\), where \(\vec{T}\) is the unit tangent vector.
- The curvature of the curve given by a vector function \(\vec{r}\) is
The Normal and Binormal Vectors
- Many vectors are orthogonal to the unit tangent vector \(\vec{T}(t)\). Note that \(\vec{T}(t) \cdot \vec{T}'(t) = 0\), so \(\vec{T}'(t)\) is orthogonal to \(\vec{T}(t)\).
- At any point where \(\kappa \neq 0\), we can define the principal unit normal vector/unit normal vector \(\vec{N}(t) = \frac{\vec{T}'(t)}{\| \vec{T}'(t) \|\).
- The unit normal vector indicates the direction in which the curve is turning at each point.
- \(\vec{B}(t) = \vec{T}(n) \times \vec{N}(t)\) - binormal vector. Is a unit vector orthogonal to \(\vec{T}(t)\) and $$\vec{N}(t)44.
- Normal plane - plane spanned by the normal and binormal vectors. Consists of all lines orthogonal to the tangent line
- Osculating plane spanned by \(\vec{T}\) and \(\vec{N}\). Plane that comes closest to containing the part of the curve near \(\vec{P}\).
- Osculating circle/circle of curvature of \(C\) at \(P\). Shares the same tangent, normal, and curvature at \(P\).
13.4: Motion in Space
- Tangent and normal vectors can be used in physics to study velocity and acceleration along a space curve.
- Velocity vector \(\vec{v}(t) = \vec{r}'(t)\).
- Speed is the magnitude of the velocity vector.
- Acceleration is the derivative of velocity: \(\vec{a}(t) = \vec{v}'(t)\).
- Vector integrals allow us to recover velocity when acceleration is known and position when velocity is known.
- Newton’s Second Law of Motion: a force \(\vec{F}(t)\) acts on an object of mass \(m\) produces an acceleration \(\vec{a}(t)\). The following is true:
Tangent and Normal Components of Acceleration
- Acceleration can be separated into the direction of the tangent and the direction of the normal.
\(\vec{a} = a_T \vec{T} + a_n \vec{N}; a_T = v', a_N = \kappa v^2\)$
- Acceleration always lies on the plane of \(\vec{T}\) and \(\vec{N}\), the osculating plane.
- The tangential component of acceleration is \(v'\) (derivative of speed); the normal component is \(\kappa v^2\), or curvature tiems speed squared.
Chapter 14: Partial Derivatives
14.1: Functions of Two Variables
- A function of two variables is a rule that assigns an ordered pair of real numbers to a unique real number: \(R = {f(x, y) \| (x, y) \in D}\).
- Linear functions of two variables are important in multivariable calculus.
- Level curves: curves satisfying \(f(x, y) = k\) for some constant \(k \in R\).
- A function of three variables maps points in \(\mathbb{R}^3\) to a real number.
- A function of \(n\) variables: maps an \(n\)-tuple within \(\mathbb{R}^n\) to a real number.
14.2: Limits and Continuity
- Let \(f\) be a function of two variables; the limit of \(f(x, y)\) as \((x, y)\) approaches \((a, b)\) is \(L\):
- We can let \((x, y)\) approach \((a, b)\) from an infinite number of directions (as opposed to just two in one dimension).
If \(f(x, y) \to L_1\) as \((x, y) \to (a, b)\) along a path \(C_1\) and If \(f(x, y) \to L_2\) as \((x, y) \to (a, b)\) along a path \(C_12$ with\)L_1 \neq L_2\(, then the limit\)\lim_{(x, y) \to (a, b)} f(x, y)$$ does not exist.
Continuity
- A function of two variables is continuous at \((a, b)\) if \(\lim_{(x, y) \to (a, b)} f(x, y) = f(a, b)\). \(f\) is continuous on \(D\) if \(f\) is continuous at every point \((a, b)\) in \(D\).
- If the point \((x, y)\) changes, then the value of \(f(x, y)\) changes by a small amount: there is no hole or break.
- Polynomial function of two variables - sum of terms in \(c^my^n\).
- Rational function: a ratio of polynomials.
- All polynomials and rtional functions are continuous on their domains.
Functions of 3+ variables
- Everything can be expanded two three or more dimensions.
- If \(f\) is defined on a subset \(D\) of \(\mathbb{R}^n\), then \(\lim_{x\to a} f(x) = L\) means that for every number \(\epsilon > 0\), there is a corresponding number \(\delta > 0\) such that if \(x \in D\) and \(0 < \| x - a \| < \delta\) then \(\| f(x) - L \| < \epsilon\).
14.3: Partial Derivatives
- The partial derivative of a function with respect to \(x\) at \((a, b)\) is denoted \(f_x(a, b)\). Thus, \(f_x(a, b) = g'(a)\) where \(g(x) = f(x, b)\).
- The partial derivative of \(f\) with respect to some variable at \((a, b)\) is obtained by fixing other variables and finding the ordinary derivative at \(b\) of the fixed function.
- Alternative notation: \(\frac{\alpha f}{\alpha x}\)
- To find \(f_x\), treat \(y\) as a constant and differentiate w.r.t. \(x\). Vice versa for \(f_y\).
Interpretations of Partial Derivatives
- By fixing other dimensions at a constant, we restrict attention to the curve at which a hyperplane intersects the surface.
- In two dimensions, \(f_x(a, b)\) and \(f_y(a, b)\) an be interpreted as the slopes of the tangent lines at \(P(a, b, c)\) to the traces \(C_1\) and \(C_2\) of the surface \(S\) in the planes \(y=b\) and \(x=a\).
- \(\alpha z / \alpha y\) is the rate of change in \(z\) with respect to \(y\) when \(x\) is fixed for some function \(z = f(x, y)\).
Higher Derivatives
- We can compute higher-order partial derivatives:
Clairaut’s Theorem. Suppose \(f\) is defined on a disk \(D\) tht contains the point \(a, b\). If the functions \(f_{xy}\) and \(f_{yz}\) are both continuous on \(D\), then \(f_{xy}(a, b) = f_{yz} (a, b)\).
Partial Differential Equations
- Laplace’s equation: \(\frac{\alpha^2 u}{\alpha x^2} + \frac{\alpha^2 u}{\alpha y^2} = 0\)
- Harmonic functions are solutions to Laplace’s equation.
- 3-dimensional Laplace equation: \(\frac{\alpha^2 u}{\alpha x^2} + \frac{\alpha^2 u}{\alpha y^2} + \frac{\alpha^2 u}{\alpha z^2} = 0\)
- Wave equation: \(\frac{\alpha^2 u}{\alpha t^2} = a^2 \frac{\alpha^2 u}{\alpha x^2}\)
Differentials
- We can define the differential to be an independent variable.
- Differential of \(y\) is \(dy = f'(x) dx\)
- For a differentiable function of two variables, we can define \(dx\) and \(dy\) to be independent variables. The total differential \(dz\) is
$$f(x, y) \approx f(a, b) + dz44
14.4: Tangent Lines and Linear Approximations
- We can extend the tangent line to approximate values near a point.
Tangent Planes
- The tangent plane to the surface \(S\) at point \(P\) is the plane containing both tangent lines.
Linear Approximations
- Linearization \(L\): a linear approximation/tangent plane approximation of a function \(f\) at some point \(P\).
14.7: Maximum and Minimum Values
- If \(f\) has a local maximum or minimum at \((a, b)\) and the first-order partial derivatives of \(f\) exist there, then \(f_x(a, b) = 0\) and \(f_y(a, b) = 0\).
- Critical point/stationary point: if both partial derivatives are 0 or one of them does not exist.
- Second derivative test - find \(D\) as follows.
- If \(D > 0\), then \(f(a, b)\) is a local minimum or maximum.
- If \(f_{xx}(a, b) > 0\), then local minimum.
- If \(f_{xx}(a, b) < 0\), then local maximum.
- If \(D < 0\), then not a local maximum or minimum (saddle point).
- If \(D = 0\), then inconclusive.
Absolute Maximum and Minimum Values
- Extreme Value Theorem - if \(f\) is continuous on a closed interval \({a, b]\), then \(f\) has an bsolute minimum and maximum value.
- A closed set contains all of its boundary points.
- A bounded set is ‘finite’.
- To find the absolute minimum and maximum values, find the critical points, find the extreme values on the boundary, and find the largest and smallest values from these sets.
Chapter 15: Multiple Integrals
15.1: Double Integrals over Rectangles
- We can find the volume of a solid with double integrals.
- We can consider a function of two variables defined on a closed rectangle \(R = [a, b] \times [c, d]\).
The double integral of \(f\) over the rectangle \(R\) is
\(\int \int_R f(x, y) dA = \lim_{m, n \to \infty}\) \sum^m_{i=1} \sum^n_{j=1} f(x_{ij}^, y_{ij}^) \Delta A$$
- Double Riemann sum: approximation of a Riemann sum.
- Methods using for approximating single integrals have parallels in double integrals.
- Midpoint Rule for double integrals
- Iterated integrals
- Partial integration (similar to partial differentiation): treat the inside integral as a function and integrate.
- Iterated integral: \(\int_a^b \int_c^d f(x, y) dy dx\); integrate \(y\) from \(c\) to \(d\), then \(x\) from \(a\) to \(b\).
- Fubini’s theorem:
15.2: Double Integrals over General Regions
- For single integrals, we always integrate over an interval.
- For double integrals, we want to integrate a function over regions of a general shape \(D\).
- Function \(F\): \(f(x, y)\) if \((x, y)\) is in \(D\) and \(0\) if in a rectangle \(R\) but not in \(D\).
- Double integral of \(f\) over \(D\):
- Type 1 plane region: lies between the graphs of two continuous functions of \(x\).
- Choose a rectangle \(R = [a, b] \times [c, d]\) that contains \(D\). By Fubini’s theorem, we have

- Type II: oriented in the other direction; express instead by integrating w.r.t. \(y\).

Properties of Double Integrals


*The following is true if \(f(x, y) \ge g(x, y)$4 for all\)(x, y)44 in \(D\).

Given \(D = D_1 \union D_2\) and \(D_1\) does not overlap with \(D_2\), then the following is true:



15.3: Double Integrals in Polar COordinates
- Suppose we want to evaluate a double integral on a circular region. It is difficult to integrate in a Euclidean system, but easier using polar coordinates.
- If \(f\) is continuous on a polar rectangle \(R\) given by \(0 \le a \le r \le b\), \(\alpha \le \theta \le \beta\), where \(0 \le \beta - \alpha \le 2 \pi\), then
We have \(x = r \cos \theta, y = r \sin \theta\).
If \(f\) is continuous on a polar region of the form $$D = {(r, \theta) \alpha \le \theta \le \beta, h_1 (\theta) \le r \le h_2 (\theta )}$$.
15.4: Applications of Double Integrals
Density and Mass
- We can approximate the mass of an object by integrating over the surface.
- We can measure total charge by integrating over the individual charges at each instance.
Moments and Centers of Mass
- We can consider a lamina with uniform density using double integrals.
Moment of Inertia
- Second moment/moment of inertia: \(mr^2\), where \(m\) is the pass of the particle and \(r\) is the distance from the particle to the axis.
- Apply to a lamina with density function \(\rho(x, y)\).
Moment of inertia of the lamina about the \(x\)-axis:
\[I_x = \int \int_D y^2 \rho(x, y) dA\]Moment of inertia of the lamina about the \(y\)-axis:
\[I_y = \int \int_D x^2 \rho(x, y) dA\]Moment of inertia of the lamina about the origin/polar moment of inertia:
\[I_0 = \int \int_D (x^2 + y^2) \rho(x, y) dA\] \[I_0 = I_x + I_y\]